1.4 核心算法
简单介绍下 Cube 构建引擎在构建 Cube 时用到的算法.
预计算过程是 Kylin 从 Hive 中读取原始数据,按照我们选定的维度进行计算,并将结果集保存到 Hbase 中,默认的计算引擎为 MapReduce,可以选择 Spark 作为计算引擎。
一次 build 的结果,我们称为一个 Segment。构建过程中会涉及多个 Cuboid 的创建,具体创建过程算法由kylin.cube.algorithm参数决定,参数值可选 auto,layer 和 inmem, 默认值为 auto,即 Kylin 会通过采集数据动态地选择一个算法 (layer or inmem),如果用户很了解 Kylin 和自身的数据、集群,可以直接设置喜欢的算法。
1. 逐层构建算法(layer)
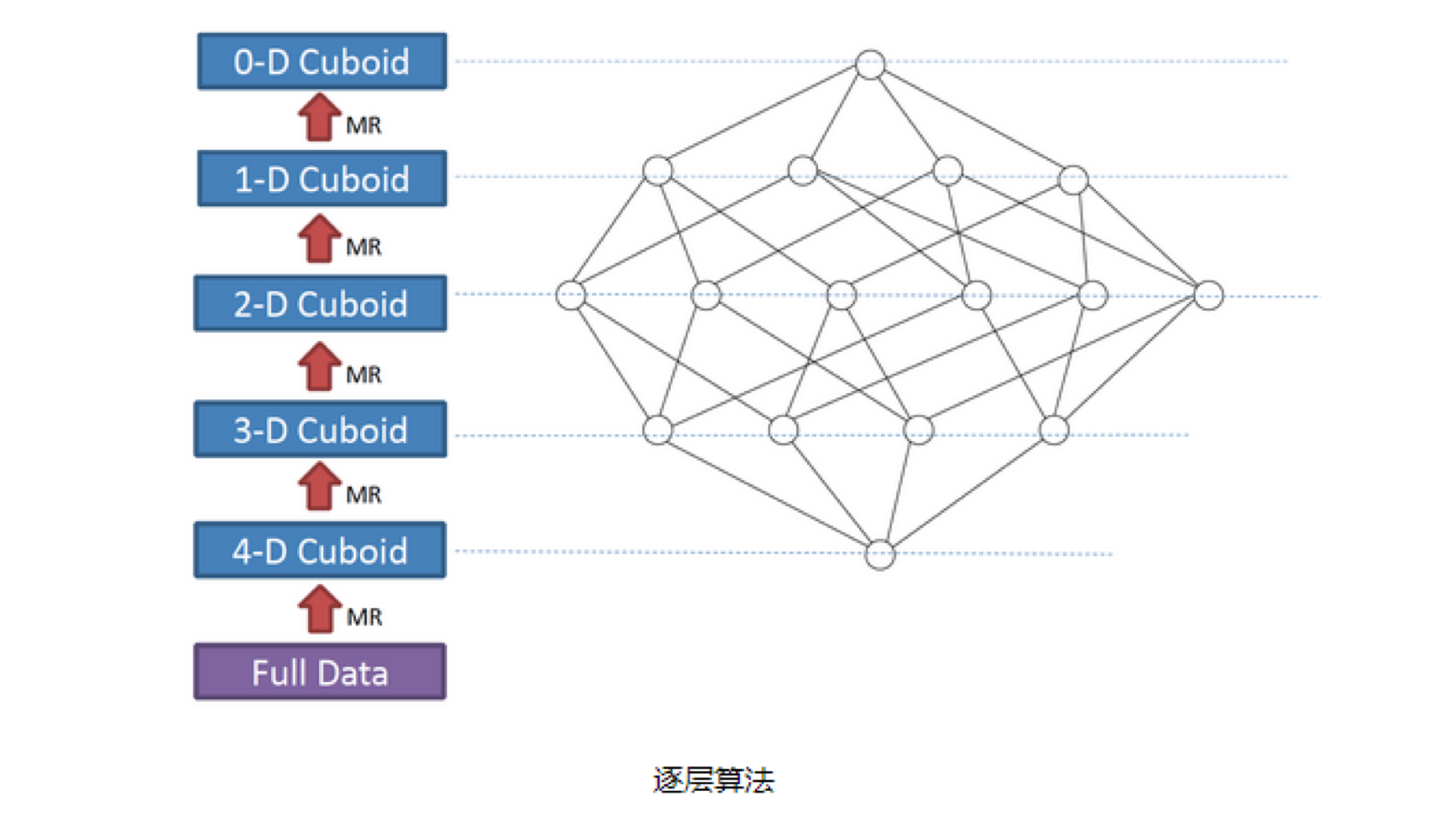
我们知道,一个 N 维的 Cube,是由 1 个 N 维子立方体、N 个 (N-1) 维子立方体、N*(N-1)/2个(N-2)维子立方体、......、N个1维子立方体和1个0维子立方体构成,总共有2^N个子立方体组成,
在逐层算法中,按维度数逐层减少来计算,每个层级的计算(除了第一层,它是从原始数据聚合而来),是基于它上一层级的结果来计算的。比如,[Group by A, B]的结果,可以基于[Group by A, B, C]的结果,通过去掉C后聚合得来的;这样可以减少重复计算;当 0 维度Cuboid计算出来的时候,整个Cube的计算也就完成了。
每一轮的计算都是一个MapReduce任务,且串行执行;一个 N 维的 Cube,至少需要 N 次 MapReduce Job。
算法优点:
此算法充分利用了 MapReduce 的能力,处理了中间复杂的排序和洗牌工作,故而算法代码清晰简单,易于维护;
受益于 Hadoop 的日趋成熟,此算法对集群要求低,运行稳定;在内部维护 Kylin 的过程中,很少遇到在这几步出错的情况;即便是在Hadoop集群比较繁忙的时候,任务也能完成。
算法缺点:
当 Cube 有比较多维度的时候,所需要的 MapReduce 任务也相应增加;由于Hadoop的任务调度需要耗费额外资源,特别是集群较庞大的时候,反复递交任务造成的额外开销会相当可观;
由于 Mapper 不做预聚合,此算法会对 Hadoop MapReduce 输出较多数据; 虽然已经使用了Combiner 来减少从 Mapper 端到 Reducer 端的数据传输,所有数据依然需要通过 Hadoop MapReduce 来排序和组合才能被聚合,无形之中增加了集群的压力;
对 HDFS 的读写操作较多:由于每一层计算的输出会用做下一层计算的输入,这些
Key-Value需要写到 HDFS 上;当所有计算都完成后,Kylin 还需要额外的一轮任务将这些文件转成 HBase 的 HFile 格式,以导入到 HBase 中去;
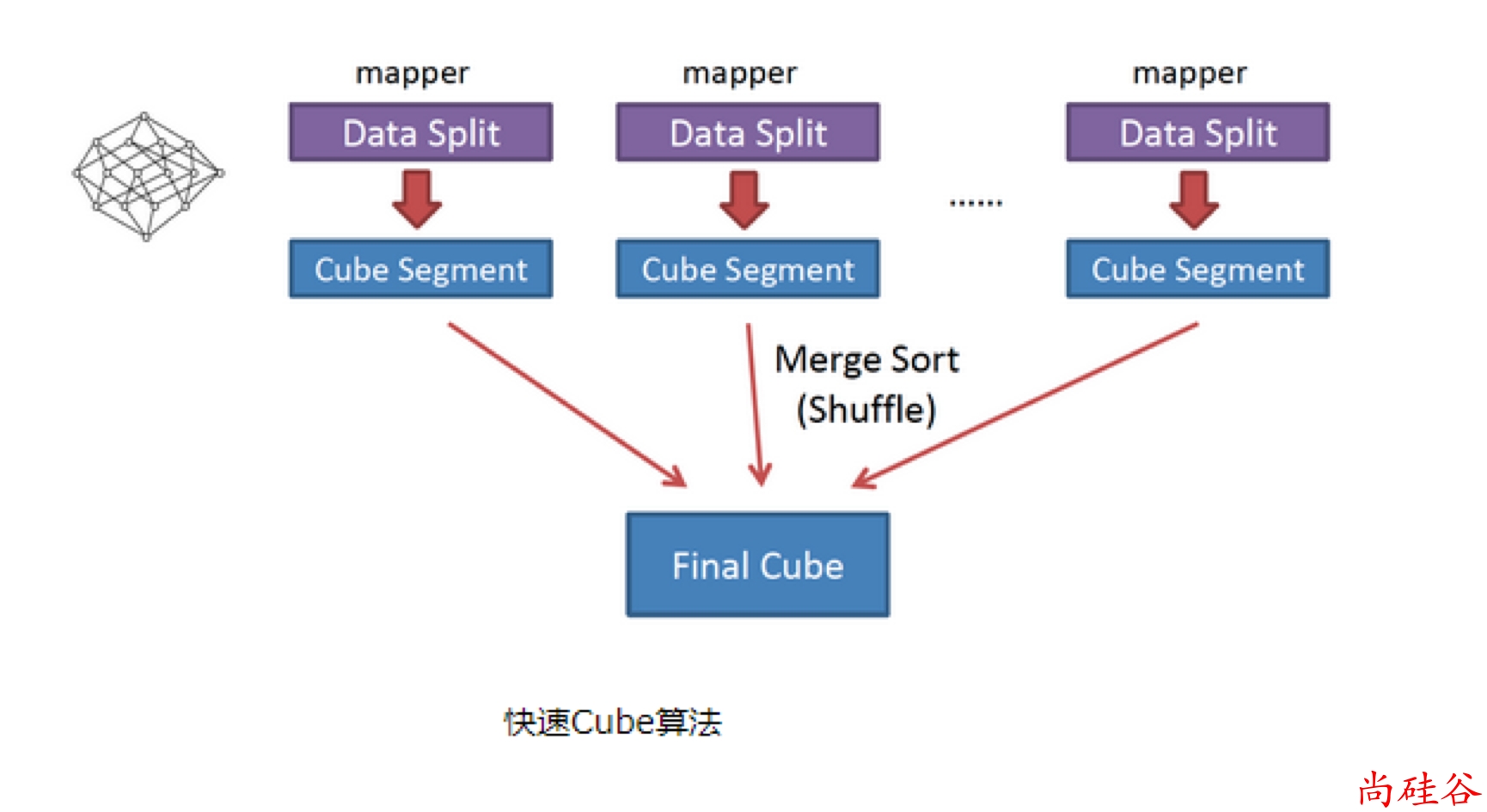
2. 快速构建算法(inmem)
也被称作“逐段”(By Segment) 或“逐块”(By Split) 算法,从1.5.x开始引入该算法
利用Mapper端计算先完成大部分聚合,再将聚合后的结果交给Reducer,从而降低对网络瓶颈的压力。
该算法的主要思想是,对Mapper所分配的数据块,将它计算成一个完整的小Cube 段(包含所有 Cuboid );每个 Mapper将 计算完的 Cube 段输出给 Reducer 做合并,生成大 Cube,也就是最终结果;如图所示解释了此流程。
与旧算法相比,快速算法主要有两点不同:
Mapper 会利用内存做预聚合,算出所有组合;Mapper 输出的每个 Key 都是不同的,这样会减少输出到 Hadoop MapReduce 的数据量,Combiner 也不再需要;
一轮 MapReduce 便会完成所有层次的计算,减少 Hadoop 任务的调配。